top of page

Implementação de Algoritmos de Planeamento de Trajectórias de Robôs Móveis
Dissertação do MIEEC
PLANEAMENTO
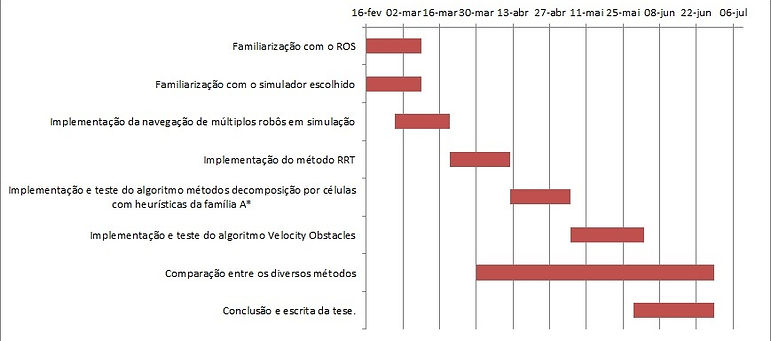
O planeamento das tarefas está representado no seguinte diagrama de Gantt. Ao longo do semestre este plano poderá ser modificado consoante as necessidades do projeto.
bottom of page