Implementação de Algoritmos de Planeamento de Trajectórias de Robôs Móveis
Dissertação do MIEEC
Resultados
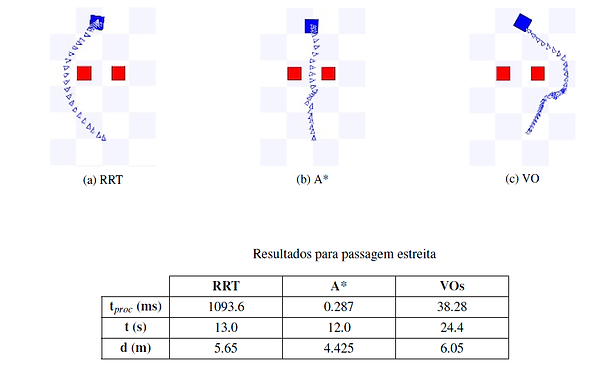
Os três métodos, RRT, decomposição em células com heurística A* e Velocity Obstacles foram implementados em simulação.
Foram feitas comparações entre os três métodos, sendo apresentados alguns resultados para as trajetórias obtidas por cada um deles. Como critérios de comparação foram usados o tempo de processamento, a distância percorrida e o tempo para a percorrer.
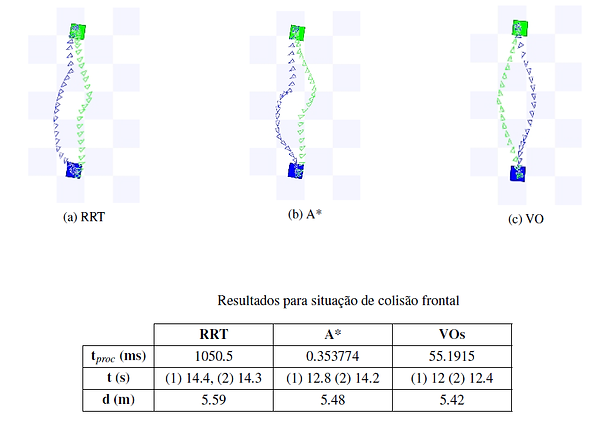
Foram apresentados três exemplos, apresentados pela ordem seguinte, situação com obstáculos dinâmicos, situação com obstáculos estáticos e situação com dois robots a evitar colisões.
No dois primeiros casos o A* foi o que obteve melhores resultados, no último caso o que obteve os melhores resultados foi o Velocity Obstacles, pois existe reciprocidade entre os robots.